Med alla framsteg vi sett inom artificiell intelligens under de senaste åren, kan vi lugnt påstå att maskiner blir allt smartare.
Trots detta kräver robotar i våra fabriker fortfarande en hel del förprogrammering, för att de ska kunna känna igen föremålen de hanterar.
Detta kan snart höra till det förflutna, då forskare vid MIT:s Computer Science and Artificial Intelligence Laboratory (CSAIL) har utvecklat ett system som gör det möjligt för robotar att identifiera, plocka och och hantera föremål de inte stött på tidigare.
(OBS. Länkar i denna artikel kan vara skrivna på engelska).
Enligt The Robot Report var "arbetslagets huvudsakliga arbetsmetod att se på föremål som samlingar av 3D-punkter, som fungerar som slags visuella ritningar."
De två vanligaste metoderna som robotar använder sig av för att plocka upp föremål är positionsbaserade system (som uppskattar föremålets position och orientering), samt geometri-baserade grepp-algoritmer.
Dessa kan fungera bra under särskilda förutsättningar, men båda metoder har sina nackdelar. Ett system baserat på position kan inte hantera föremål med många olika former särskilt bra och grepp-algoritmer är ofta klumpiga när det kommer till att placera föremål.
Visuella ritningar
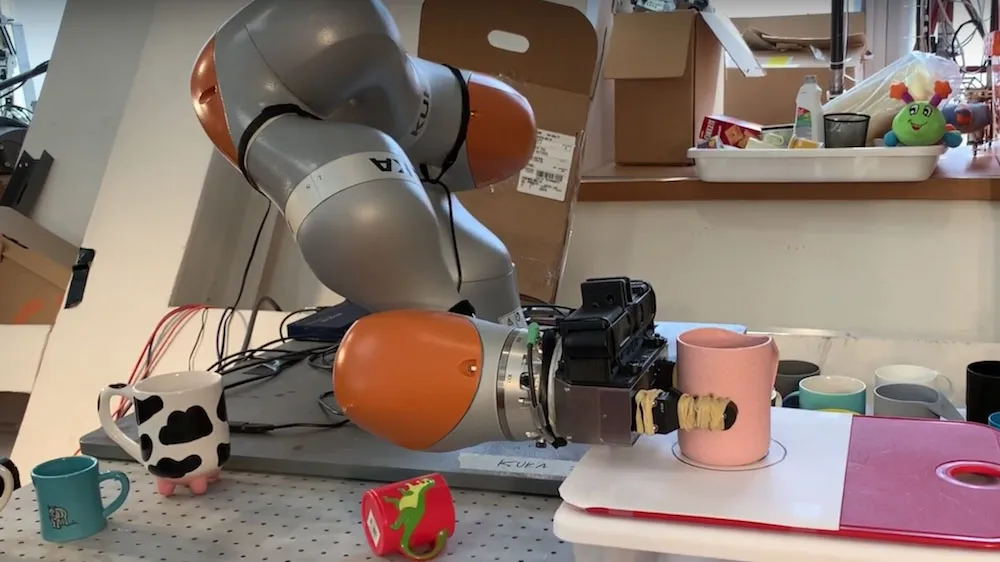
Det nya systemet som kallas för kPAM (Keypoint Affordance Manipulation) gör det möjligt för robotar att utföra uppgifter som att hänga upp muggar på ett ställ eller lägga upp skor på hyllor, utan att ha sett föremålen tidigare.
Studiens ledande författare, Russ Tedrake, förklarar: "Det räcker med en lite större förståelse om föremålet - placeringarna på några få nyckelpunkter - för att göra ett brett utbud av uppgifter möjliga."

Robot Report säger att "arbetslaget härnäst hoppas på att göra det möjligt för systemet att utföra uppgifter med en ännu större generaliserbarhet, som att plocka i och ur diskmaskinen eller torka diskbänken i ett kök."
Även om robotar som städar köket åt dig låter som en lockande idé, kan teknologin som utvecklas i den här studien framför allt få en enorm inverkan på fabriksmaskiner. Detta då teknologin minskar behovet för förprogrammering och gör tillverkningsprocessen mycket mer effektiv.
Teknologin är fortfarande i sina tidiga stadier, så det kommer förmodligen att dröja några år innan vi får se kPAM integrerat i fabriksmaskiner.
Via The Robot Report














